I thought it was a little weird to be learning turning in lesson 5, as we had already been turning in previous lessons. This lesson is more of a revision lesson to cover everything that we’ve learnt so far, so it covers climbing, descending and turning – including turning whilst climbing and turning whilst descending.
I arrived a little early for my lesson, so I made a coffee (or, more accurately, Alice, the wonderful office manager) made one for me, and I had a chat with a chap called Adam who was in on work experience whilst studying for his GCSEs. He wanted to be a commercial pilot so was really keen to discover what goes on in flight training. He asked if he could sit in the back seat for my lesson, which I had no problem with – so he was happy.
This was my first lesson with a different instructor. My regular instructor up until now only works on Saturdays, and today’s lesson was mid-week. I was a bit apprehensive after getting on so well with my instructor and worried about potentially re-covering old ground but I needn’t have worried. In my learners file, my instructor had left good notes about what we had covered so far, and what he suggested should be next.
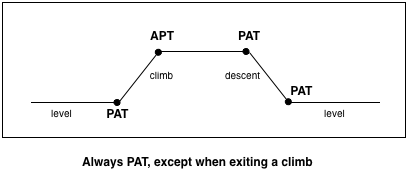
In the pre-flight briefing, I learnt that when turning straight and level, it’s normal to use 30 degrees angle of bank. It’s also ok (and expected) to use 30 degrees of bank in descending turns, except when turning on to final, which should be limited to 20 because of the slower airspeed and increase stall speed (more about that later).
Climbing turns should be limited to 15 degrees of bank to maintain airspeed.
Before starting a turn, it’s critical to have a good lookout. This involves looking across the full 180 degrees, starting from behind your shoulder on the opposite side to where you’re turning, across to end up looking at where you’ll be turning in to. If it’s all clear, start the turn.
Whilst in a climbing or descending turn, just like when climbing or descending when straight, it’s important to DABLE every 500ft.
I taxyed from the apron to the holding point, then ran through the pre-flight checklist. I missed the fuel pump check (it needs to go on) – exactly the same mistake I’d made last lesson. I must make a mental note to double-check this from now on! I also made the mistake of braking whilst power was on. Just like we don’t brake with our foot on the accelerator in a car, we should always reduce power to idle before using the brake. I’d not picked up on this in previous lessons, so I’ve noted it ready for next time.
I made the ‘ready for departure’ radio call, and we received clearance to take-off.
Then we ran through the ‘on runway’ part of the checklist, which is something the instructor had been doing for me up until now. There are four elements in this list:
- Anti-collision lights – on
- Transponder – set to ALT
- Pitot heat – as required (from what I can remember reading, pitot heat is used to prevent icing of the pitot tube, which is used to measure air speed. Only needed if it’s cold outside)
- Landing light – on
Checks done, and it’s time to take-off. We rotated at 60, climbed at 80 and then (because we were on runway 27) turned to the right for noise abatement. Up until now, I’d been turning right using the specified heading (of 280 degrees) but hadn’t been able to look down below to see what we’re avoiding. So we took this opportunity for the instructor to take control, giving me a chance to have a look down. There’s a housing estate to the left, and a village to the right. By turning this way, we avoid flying over either, and hopefully do our bit to keeping the neighbours happy. My instructor reminded me that noise abatement procedures aren’t something you legally have to follow – so if in an emergency situation we needed to head in that direction then that would be ok – but obviously normally it’s good airmanship to take obey them. Here’s a grab from the GoPro showing the housing estate on the left, and the village church on the right. Notice how we’re avoiding them both:

I also learnt that I should keep my right hand on the throttle until we reach at least 300ft AGL. I have a tendency to put both hands on the yoke as soon as we’ve rotated, which is a bad habit I need to get out of. It’s important to keep one hand on the throttle incase it accidentally slips back (it could be loose) as a quick reaction would be necessary to re-apply full power to prevent a nasty ending.
After a couple of level turns, I did a couple of climbing and descending turns. Nothing too different from when when I’d turned in previous lessons, although I was trying to improve my lookout technique, which did seem to improve.
We’d now been up in the air around 15 minutes and so I did a FREDA check, which first came up in lesson 2. I learnt that I’d been missing a couple of checks, specifically:
- Fuel – is the fuel pump on? should it be? (Above 1000 ft, it can normally be off. When switching it off, check that fuel pressure is maintained. If it goes down, switch it back on. Switch fuel pump on before changing tank & off after changing – checking pressure is maintained.)
- Engine – carb heat check – turn to hot for around 10 seconds, check the drop in rpm and make sure it returns to normal after switching it back to cold.
We should always do a FREDA check at the top of a climb, and every 15 minutes or so. My instructor recommended switching fuel tank every 30 minutes.
After practicing some more turns, the instructor demonstrated a stall in preparation for next lesson. A lot of people dread the word ‘stall’ and fear can strike upon hearing it. The purpose of the demonstration was to show that stalling doesn’t feel like some torturous experience and can be recovered from relatively easily. Sure enough, as we airspeed decreased and edged towards 50kts, the stall warning alarm sounded. Normally that would be the sign to prevent the stall, but for the purposes of this demonstration we continued to lose airspeed and went in to a stall. We recovered and noted that we’d lost about 200ft altitude in the stall. It didn’t feel that bad – it certainly wasn’t anything like being on the Tower of Terror at Disney!
Finally, we headed back towards the airfield and requested a standard overhead join, a first for me as up previous joins have been direct on to final approach. I’ve been reading up on circuits and rejoining the circuit and had the theory in my head, but was keen to see it in practice.
When joining the circuit with a standard overhead join, you fly towards the airfield at 1000ft above circuit level (standard circuit level, and at Gloucester, is 1000ft, so fly at 2000ft AGL) looking for the active runway. A right-hand circuit was in operation, so I had to keep the airfield on my right at all times. My instructor said something which I found really helpful – imagine the airfield is a roundabout (if you were in a car), and you need to go around it looking for your exit – the active runway. So that’s what I did, I found runway 27, flew over the ’27’ numbers and entered the dead side. Whilst on the deadside, we need to descend down to circuit height at the end of the dead side leg, ready to turn crosswind. I used 1500rpm and a fairly wide arc to turn us, flying over the ’09’ numbers at the other end of the runway at 1000ft. At 1000ft, I increased power back to the cruise setting of 2350, flying at 95kts. After flying straight for a bit, I made a 90 degree turn (level, so 30 degrees of bank) and flew downwind – parallel to the runway.
When turning in the circuit, it really helps to use outside references for turning so that we can focus on lookout and flying the plane rather than spending too much time looking at the direction indicator. Circuits can be very busy and demand total attention and concentration. I then turned (level, with 30 degrees of bank) on to base leg and as soon as the wings were level, checked we’re below Vfe (max flap speed) and selected 2 stages of flap (25 degrees), adjusting attitude for 75kts.
As you approach being 90degrees to the runway, turn on to final remembering to use a maximum 20 degrees of bank (because of flaps and the lower airspeed) then select full flap and adjust attitude for 65kts.
Another acronym: TCP checks:
- Toes – clear of the brake pedals
- Carb heat – cold
- Permission – do we have permission to land?
The landing went well – really smooth in fact – the instructor said “I didn’t even notice we touched the ground”. Beginners luck? We’ll see. After landing, we had permission to backtrack (turn around and go back up the runway to vacate it), which the instructor did whilst I got my checklist and prepared for the after landing checks. So many checks!
Something I’ve tripped up with a couple of times now is the confusing terminology around flaps. In the closing down checklist, it says Flaps Up. In the Warrior, flaps are controlled using a lever that’s a bit like a handbrake in a car. When the lever is up, the flaps are down (eg. extended). When the lever is down and touching the floor, flaps are up. Flaps Up in the checklist sense means make sure the flaps are up and the lever is down – which makes sense when you think about why we are doing this as a post-landing check. However, for the second time I read “flaps up”, saw the lever was up and said “flaps are up”, before being corrected by my instructor. Silly mistake to make and something else to watch out for in future flights. In my day job, I spend a lot of time talking about usability (of websites) and a big part of that is about designing-away ambiguity. I get the impression that User Centred Design wasn’t a big part of the Piper Warrior design process back in 1970.
Here’s a video clip of me doing the landing, starting from the overhead join:
Next lesson (I’d booked a double lesson, so next lesson starts almost immediately) is slow flight & stalling part one.









{kind=link}